PICマイコン+タミヤ工作セットでできる
「ロボット改造工作マニュアル2」
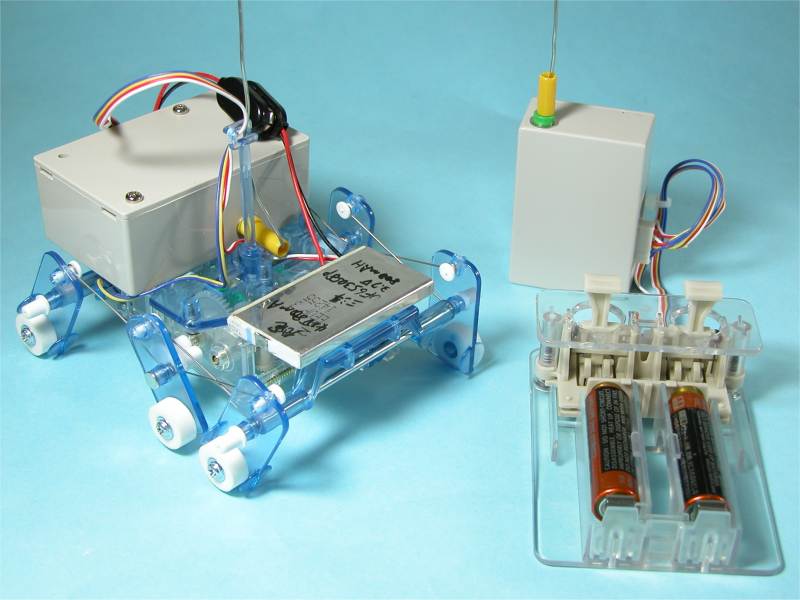
ラジコンロボット 6足インセクト
技術評論社 ISBN4-7741-2057-X
全国書店にて発売中です。
182頁 \1,980+税
CD-ROM、プリント基板付
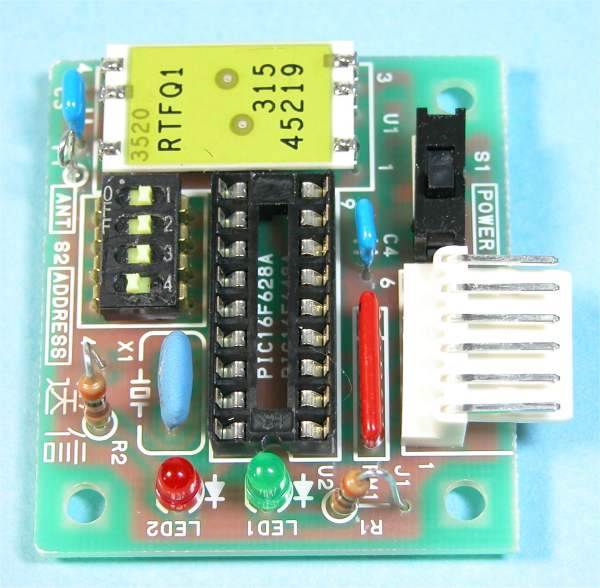
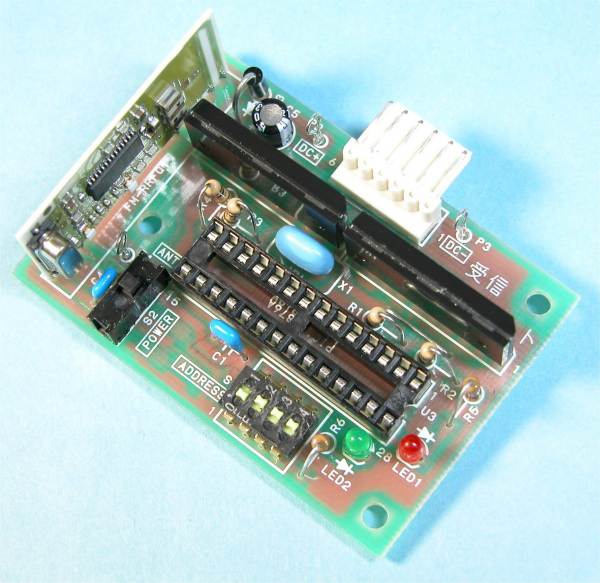
付録基板
送信機基板
受信機基板
ロボットの自作改造シリーズとして、今回の題材としたのは、「インセクト」という昆虫型ロボットです。さらに今回はラジコン化に挑戦しました。市販の無線送受信モジュールを使いましたので、完全無調整で無線操縦が実現できます。6本の足と2個のモータで、こおろぎのようになかなか面白い動きをします。初心者の方でもきっとできると思います。思い通りに動いた時の感動を、ぜひ多くの方々に味わっていただきたいと思います
本書には付録にプリント基板が付いています。
この基板の組み立てに必要な部品もキットで入手できるようにしました。
★ 組み立てに必要な部品一式のキット → サトー電気 で発売中
★ 追加のプリント基板注文 → P板.COM より
【 目 次 】
第1章 インセクトと動く仕組み
1-1 走る仕組み
1-2 インセクトの走るしくみとリモコンのしくみ
-1 クランクとリンクロッドのしくみ
-2 リモコンのしくみ
1-3 インセクト改造講座
-1 改造機能のしくみ
-2 何を使ってどう制御するか
第2章 ラジコン化
2-1 無線による通信のしくみ
-1 変調回路
-2 受信部
2-2 無線送受信モジュール
-1 無線送受信モジュールの規格
-2 外観とピン配置
2-3 データフォーマット
-1 データの形式
-2 データ通信フォーマット
-3 4匹対応のデータフォーマット
第3章 PICマイコンの動作のしくみ
3-1 PICマイコンのしくみ
-1 PICマイコンの中身
-2 プログラムメモリと命令実行のしくみ
-3 PICの命令の種類と実行の流れ
3-2 マイコン入出力制御の基本
-1 入出力ピンとプログラムの関係
-2 2進数と16進数
-3 入出力ピンの使い方
3-3 インセクトの改造に利用するPICの機能
-1 モータの制御
-3 データ通信とUSART
-4 リモコンボックスの制御
第4章 C言語プログラミングに必要な知識
4-1 プログラミングに必要な知識
-1 プログラミング言語の種類
-2 開発環境
-3 MPLAB IDEの概要
-4 CCS社Cコンパイラ
4-2 C言語プログラムの書式
-1 C言語プログラムの構成
-2 関数の書式
4-3 入出力ピン制御用関数の使い方
-1 初期設定と組み込み関数
-2 入出力ピン制御用関数を使った例
4-4 USART制御用関数の使い方
-1 USARTの初期設定とパラメータ設定
-2 USARTを使った送受信の実行
第5章 1匹対応送信ユニットの製作
5-1 全体の構成
-1 実現する機能目標
-2 全体の構成
5-2 PIC16F628Aの概要
-1 PIC16F628Aの内部構成
-2 PIC16F628Aのピン配置と特徴
5-3 回路設計
-1 電源部の設計
-2 全体の回路
5-4 使用部品と組み立て
-1 使用部品一覧
5-5 送信ユニットの組み立て
-1 電源部分の組み立て
-2 U3周りのコンデンサを取り付ける
-3 ICソケット、スイッチ、抵抗などをはんだづけ
-4 ケースに実装
5-6 リモコンボックスの改造
-1 スイッチ部の配線パターンの切断
-2 接続ケーブルの改造
-3 コネクタに挿入
-4 完成
-5 動作テスト
5-7 プログラムの製作
-1 全体の構成
-2 プログラム全体
第6章 受信ユニットの製作
6-1 全体の構成
-1 実現する機能目標
-2 全体の構成
6-2 PIC16F873Aの概要
-1 PIC16F873Aの内部構成
-2 PIC16F873Aのピン配置と特徴
6-3 回路設計
-1 全体回路の説明
6-4 受信ユニットの使用部品
-1 部品一覧
6-5 受信ユニットの組み立て
-1 電源部分の組み立て
-2 ICソケットと周辺の小さな部品を実装する
-3 その他の部品を装着する
-4 ケースに実装
6-6 インセクト本体の組み立て
-1 モータの接続
-2 モータノイズ対策コンデンサの取り付け
-3 アンテナの製作
-4 受信ユニットの搭載
-5 動作テスト
6-7 プログラムの製作
-1 全体の構成
-2 データ受信部
-3 プログラム全体
第7章 4匹対応送信ユニットの製作
7-1 全体の構成
-1 実現する機能目標
-2 全体の構成
7-2 回路設計
-1 ICSP
-2 全体回路
7-3 4匹対応送信ユニットの使用部品
-1 部品一覧
7-4 4匹対応送信ユニットの組み立て
-1 4匹対応送信ユニット基板の組み立て
-2 ケースの加工
7-5 プログラム
-1 全体の構成
-2 プログラム全体
付録
A)MPLAB IDEの入手とインストール
B)CCS Cコンパイラの入手とインストール
C)PICへの書き込み