【第3回情報交換会概要】
開催日時 1998年10月24日 PM1:00〜5:30
開催場所 川崎市 中原 マイクロアプリケーションラボ内
出席者 落合 幸喜氏
川村 浩之氏
高木 美薫氏
小田島雄一氏
菅原 雄介氏
松家 光雄氏
小野寺康幸氏
藤原 久樹氏
渡邊 剛寿氏
市川 篤行氏
清水 隆 氏
矢野 百人氏
下笹 洋一氏
椎葉 克文氏
松本 英樹氏
中村 寛行氏
平戸 氏
堀 浩一郎氏
小川 晃氏氏
後閑 哲也
【まとめ】
第3回の情報交換会は総勢20名で、前2回の倍近い人数となり
盛況でした。前回同様皆さん情報収集に一生懸命の姿が印象的で
お休みも無しで5時間近い情報の交換を行いました。
今回はロボット関連の紹介が多く、今子供たちのブームになって
いる「ミニ4駆」にPICを載せたものの紹介があったりで、動く物への
PICの応用で興味深々の皆さんでした。
さらに、松家さんから、プリント基板の自作用にドライフィルムの
提供をして頂き、その使い方の説明も含めて紹介して頂きました。
今回、クラブにということで、小川さんから、「MR.PIC」というPICの
エミュレータのご寄付を頂きました。デバッグで悩んでおられる方の
役に立つツールですので、後閑が預かり、必要な皆さんから貸し出し
のご希望があったとき、宅急便で送付することとしました。
高木さんからは、オーディオ関連のメカ部品のジャンクの提供を頂き
参加者でモータやギヤなど有難く頂きました。
松家さん、小川さん、高木さんありがとうございました。
また、自社のスペースを快く提供して頂いたり、MicrochipのCDなどを
提供して頂いた、MALの小川さんには心よりお礼申し上げます。
《参加者写真》
今回は参加者が大勢でしたので、写真は別ページにあります。
下記写真にリンクされています。
【作品紹介】
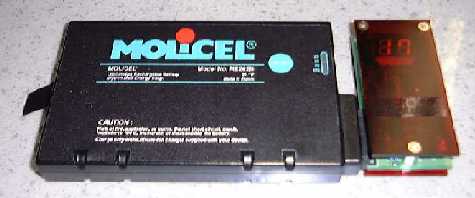
(1) 椎葉克文氏 (バッテリ電気残量計)
椎葉さんは仕事でバッテリの開発をなさっているそうで、今回その中で
考案したバッテリの電気残量を簡単に測定できるユニットの紹介です。
下図右側がバッテリの残量表示ユニット、左側はパソコンに使われる
バッテリそのもので、そのコネクタ部に、このユニットを直接接続すると、
現在残っている電気の量をパーセントで表示します。
バッテリとのインターフェースが標準規格の「SMバス」となっており、
そのプロトコルの制御と、2桁の数字表示発光ダイオードのダイナミック
点灯制御をPIC16F84で実行しています。
最近のパソコン用のバッテリには、ほとんどマイコンが内蔵されていて、
このSMバスでパソコンにデータを送ることで、バッテリ残量をグラフで
表示したり出来るようになっているそうです。
(☆SMバス:System Management BUSの詳細はこちらをクリック)
右側がPICを
応用したバッテリ
残量計です。
現在17%と表示
しています。
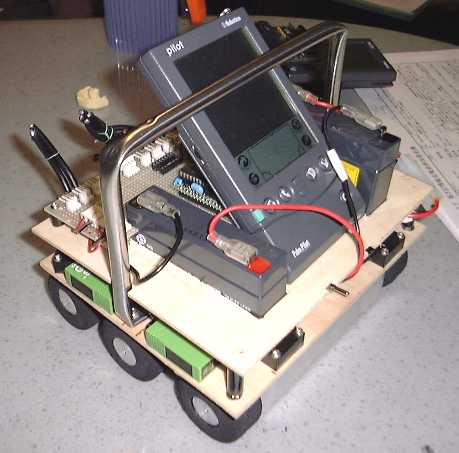
(2) 菅原雄介氏+下笹洋一氏 (相撲ロボット)
毎回、3COM(USRobotics)のPalm-Pilotを使ったロボットなどを紹介
して頂いています。
今回は、つい先日行われた相撲ロボット大会に出場した相撲ロボット
を紹介して頂きました。
お二人の分担は、下笹氏が主にPalm-Pilotのプログラムを、菅原氏が
メカや電子回路を分担されているそうです。
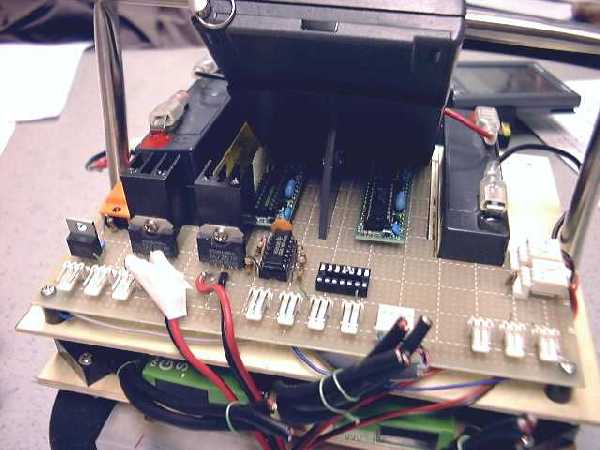
下図が相撲ロボットの全景と各部の詳細図です。

全景 PICと制御部 メカ部
全景から判るように、主となる制御装置はPalm-Pilotとなっています。
中央の写真に、秋月製のPICの載った小型基板が見えます。
これでモータの制御とセンサ入力をしています。そしてこのPICと
Palm-Pilot間はシリアル通信で行っています。
Palm-PilotのプログラムはパソコンでC言語で開発しているとのこと。
メカはマブチモータ4個で6輪を駆動しており、その連動動作の為に
チェーンと歯車を使っています。
周囲の敵のロボット検出用にOMRONの赤外線の近接センサを使って
います。(結構高価なものだとか)
鉛バッテリで動かそうとしたそうですが、馬力が出ず、結局NiCdで
動かしたそうですが、思った様には動かせなくて初戦敗退したとか?
《菅原雄介氏のホームページ》
(3) 菅原雄介氏+下笹洋一氏 (肥満度測定器)
このお二人からもうひとつユーモラスな製作品の紹介がありました。
名前が「ビールっ腹君」というのだそうで、外観は下図の写真の様に
なっているのですが、さて何をするものなのか、誰も見当がつきません
でした。
実はこれ、肥満度
測定器なのです。
写真の矢印の所から
メジャーが出てきて、
これでウェストと胸囲
を計ると、肥満度を
Palm-Pilotにユーモラス
な図で説明してくれます。
下側の箱の中にPICが入っていて、メジャーが5mm間隔で白黒の縞模様
が付けられており、メジャーを引き出すと、長さが自動的に計られてPalm-
Pilotに表示されます。ウェストと胸囲の計測が終わって、指示されたように
Palm-Pilot内のボタンをクリックすると、太ったおじさんの絵が表示されて
肥満度を教えてくれます。
なかなかユーモラスですが、今これを作品コンテストに応募中だとのこと。
長さの測定原理は5mm間隔の白黒を光で検出して境目でカウントする
方法です。
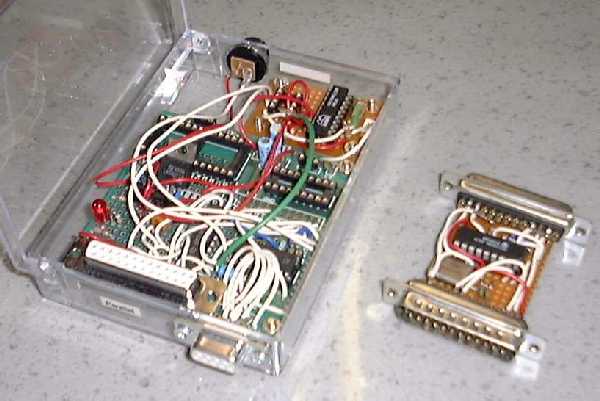
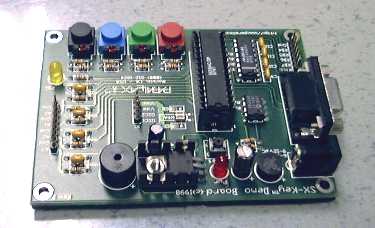
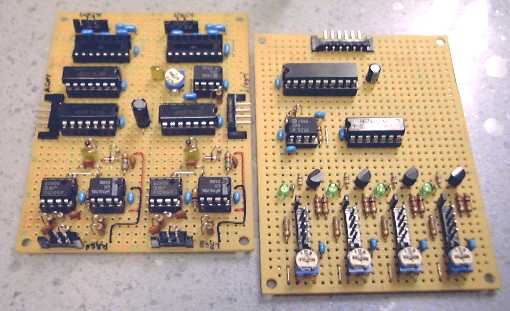
(4) 小野寺康幸氏 (SXシリーズ用ライタ)
Microchip社の競合である、SCENIX社(代理店 住商デバイス)が開発
販売している 50MHz動作のPICコンパチ製品である「SXシリーズ」用の
ライタの紹介です。
高速PICということで注目を集めているのですが、そのライタはParallax社
が出しているものしか無く、なかなか手に入らない状態です。
そこで苦労して情報を入手しながらやっと完成させたとのこと。
外観は下図写真となっており、2つのブロックで構成されています。
ひとつはパソコンのシリアルポートに接続するコネクタ変換部に実装された
PIC実装部で、ここでパソコンからのライタ信号を変換してSXシリーズ用の
書きこみ信号とタイミングを制御しています。
もうひとつは、PICのライタと全く同じ回路を利用した書きこみ電圧の切替
制御部となっています。

右側がPIC応用の信号変換と
制御を行う部分
左側が、PICへの書きこみ電源
の切替制御を行う部分で、
秋月のプラチナキットを利用
しています。
SXシリーズのデータ情報の入手にかなり苦労されたのと、マニュアルの
間違いでタイミングがとれずに苦労されたとか。
SXシリーズについては、最近100MHz版も発売?され、なかなか興味の
集まる製品です。しかし個人での購入は難しいとの話があり、まとめて
グループ購入の話も出ていました。
また、同時に小川さんから、Parallax社の評価基板の紹介もありました。
下図がそのSX評価用の基板の外観です。 真中にあるICがSXシリーズ
そのものです。
(5) 小川 晃氏 (PIC新製品の紹介)
MALの小川さんから、発表されたばかりのPICの新製品の紹介がありま
した。
品名 PIC16F877
プログラムメモリ EEPROM 8KW
A/D 変換 10ビット8チャンネル
データメモリ 368Byte
EEPROM 256Byte
外形 40ピンDIP
16C74のフラッシュメモリ版という感じ
A/Dが10ビットとアップ
上図は日本にまだ3個しかないという内の1個。日本での発売は来年早々。
価格は未定だということですが、窓付きのPROM版よりはかなり安いはず。
この他に、12ビットのA/D変換内蔵品が開発済みということで、これも
来年には、PIC16C773,774として発売されるとのこと、実用的なアナログが
扱えると、さらに一層応用範囲が広がりそうですね。
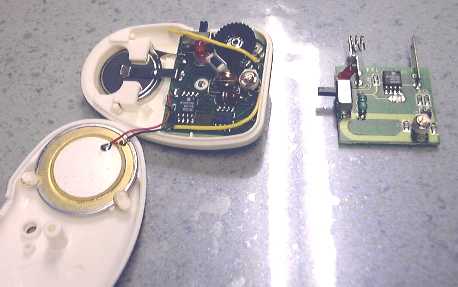
(6) 松家光雄氏 (盗難防止ブザー)
超小型のUHF帯を使った送受信機で、常時一定の信号を発信、受信し合い
信号がある間は何もしないが、互いの距離が一定以上離れて信号が受信
できなくなるとブザーがなるというもの。
写真で見るとおり非常に小型で、回路もシンプルなものですが、何と、送受
信機いずれにも、PIC12C508のフラットパッケージ版が使われている。
左が受信機、右が
送信機。
送信機はPICとトランジスタ
1個だけでできている。
受信機は、超再生受信。
PICで信号検出、ブザー
制御を実行している。
ボタン電池の大きさから
全体の大きさが推測できる。
これの応用の話で色々アイデアが出たが、ロボットの所在認識のための
目印信号発信用とか、ロボコン競技用のラジコンとかへの応用の可能性
が挙げられた。
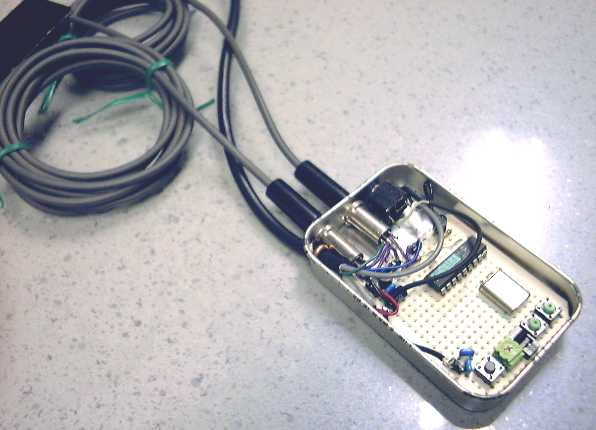
(7) 清水隆氏 (ハム用高機能スタンバイピー)
アマチュア無線のベテランである清水さんから、ハム用の実用アイデア機器
の紹介があった。送受信切替え用のスタンバイピーで、音声での自動切替を
避け、スイッチで切り替える方式。一定時間押していると連続送信になるが、
長時間送信のままにすると自動的に受信に戻るとか、ブザーで切替を
知らせるとか、キーヤーの信号発生もできるとか、小さい中に一杯機能を
盛り込んだ実用セットとなっている。

小さなケースに組み込んで、
PIC16C84だけで全ての機能を
実現している。
何回も試行錯誤の成果が見え
実用的に仕上がっていた。
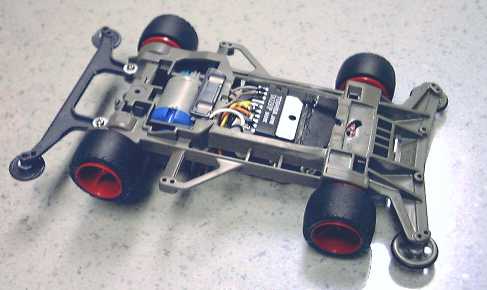
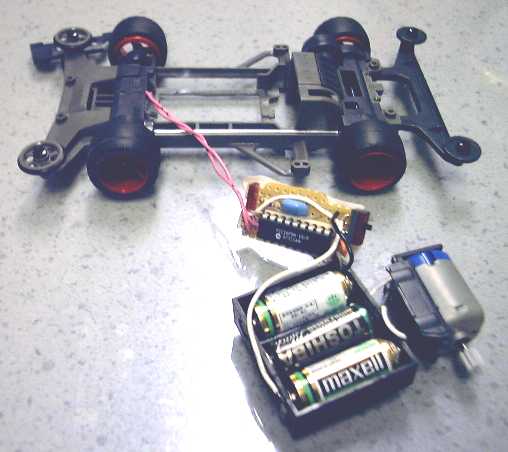
(8) 市川篤行氏 (夢のミニ4駆)
一番人気の作品、あの子供たちに大人気のミニ4駆のテレビ漫画で、
ミニ4駆自身が自分で考えて走りを最適化するのを、本当に実現して
しまおうという大胆な発想で作ったとのこと。
しかし、これだけ狭いスペースによくも組み込んだものです。
これでフラットパッケージなど使ったら完璧なものが出来るかも。
今のところ、一定間隔で前後に走るという動きをさせるだけだが、次は
カーブと直線で自動的に速度制御をしようという目標で、課題はカーブ
を認識するためのセンサを何にしようかということだそうです。
車体内部の単3電池のスペースにPICと単5電池を収納した。
モータ用のドライバICは車体下部に実装しています。
このドライブICはFETで置き換えが可能なので、さらにスペースが
楽になるという意見も出たりして、夢のある話が色々出され一時
話が盛り上がりました。
この話の中で、菅原氏より、Servo Controllerの話が出され、実際の
購入品も紹介されました。下図は、Palm-Pilotに直接接続すると、
Palm-Pilotから、サーボを直接動かすことが出来ます。
出力はラジコンの受信機から出力されるサーボ用のパルス列信号と
コンパチで、8チャンネル分同時に出力することが出来るということで
した。制御対象となるサーボは双葉のものが相性が良いとか。
また赤外線通信のオプションもあり、ノートパソコンなどからも同じ
制御が可能になるとのことでした。
ちょっとしたリモコン制御には使えますね。
下側がContoroller本体で
上部に3ピンのコネクタが
8組並んでいて、これから
サーボモジュールに接続して
制御する。
上側のものが赤外線通信
モジュールで下のController
に接続して使う。
(9) 落合幸喜氏+中村寛行氏+松本英樹氏 (自走ロボット)
母校で授業の一環で行われる自立型ロボット製作実習課題に、一般参加
するとのことで、当日そのまま仙台まで出かけるという状態で製作途中の
ロボットの紹介をして頂きました。
ロボット競技の内容は、いわゆる「鬼ごっこ」となっていて、逃げるターゲット
ロボットがいて、それの上部に附いている停止スイッチを押して止めれば
勝ちというゲームになっています。
そこで今回製作したロボットは
写真のような形状で、一目で
ロボットと判る形をしています。
それが製作者の目指した意図だ
ということで成る程といったところ
でしょうか?
外観で腕に相当する先には、
ハリセンを持っていて、これで
ターゲットとなる鬼ロボットの
頭を叩いて停止スイッチを押す
のだそうです。
鬼を探すのには、超音波で距離を
測定し、いずれか距離の近い方に
向かって行くことで捕まえるという
計画とのこと。
胸に超音波の発信受信素子が
見えます。
うまく行けばバッチリですが・・・・
内部実装状態 駆動部は連動ギヤボックス附き センサ基板一式
内部の構成はPIC16C74が全体の制御を司り、アーム角制御専用にPIC16F84
を1個使っています。
駆動部にはギヤボックス附きのDCモータを使い、方向制御のため回転数制御
をしています。
前面には液晶の表示部がついていて、これの制御をPIC16C74で行っています。
プログラム開発にはPICのCコンパイラを使っているとのことで、74のメモリが
パンク状態とのこと、かなり親切な表示、制御をしている様です。
(10)松家光雄氏 (ドライフィルムの紹介)
プリント基板を自作するときの感光用のドライフィルムの提供と、使い方
の説明がありました。
《使い方の手順》
(a)ドライフィルムの貼り付け
ドライフィルムは3層構造になっていて、感光フィルムの上下に
保護用のマイラフィルムが張り合わさっている。
このマイラフィルムの片方を剥がして、基板の洗浄済みの銅箔に
ぴったりと貼り付ける。
(b)パターン図の用意
ドライフィルムは通常の感光材と逆で、露光したところが残るので
ネガのパターン図を用意します。
(c)露光
パターン図をドライフィルムの上に重ねて、紫外線で数分から数十分、
フィルムの感光部が茶色になるのを確認できるまで露光する。
(d)現像
濃度1%の炭酸ソーダ溶液に浸して非露光部を除去する。
除去が完了したら水洗いする。
(e)エッチング
通常の第二塩化鉄で銅箔をエッチングして除去する。
エッチングが完了したら水洗いする。
(f)ドライフィルムの除去
濃度2%の苛性ソーダ溶液に浸して残っているドライフィルムを
除去して、水洗いをして完成。
ちょっと苛性ソーダ液の入手と扱いが厄介なのですが、きれいに仕上がる
ということで、試してみる価値がありそうです。
苛性ソーダは無理と言う方は、台所用金属たわしで磨けばきれいに除去
できると思います。
(11)その他の参加者プロフィール
・川村浩之氏
第1回からの連続参加。 ブイの中に実装する発信機用の制御装置
を開発している。
・藤原久樹氏
某機械メーカーで電気屋をやってます。PICはまだ使った事ないの
ですが、機会があったら使って見たいと思ってます。
・小田島雄一氏
前回から参加。その後九州への転勤となったが、当日たまたま横浜
に来ることができたということで遠路からの参加でした。
・高木美勲氏
前回から参加、オーディオ関連にお勤めということで、今回もジャンク
部品を提供して下さいました。
・渡邊剛寿氏
初参加の大学院生。自作ライタがなかなか正常動作せず悩んでいる
とのこと。今回話を聞いて、帰宅後、実装見直しをしたら、トランジスタ
が1個逆になっていたということで、直したら正常動作したということ。
この感動が次のステップへの一歩でしょうか?
・市川篤行氏
現在は半導体製造装置の機械設計を仕事としております。 つい先日
トラ技の特集でPICの存在を知り、秋月のPICライタを購入/製作し、
PICとはいかなるものか実感したばかりです。 どんどん勉強して早く
自分の製作物が作れるように頑張りたいと思います。
・平戸氏
今回初参加、PICクラブの存在を知り、前日急遽参加申し込み。
・堀浩一郎氏
MALにお世話になっている学生さん。 何か勉強になることが・・・
【番外編】
落合氏+中村氏+松本氏が製作したロボットで、母校でのコンテストに参加
し、見事予定通りデザイン賞を獲得したとのこと。
以下は、落合さんからの結果報告と写真です。
さて、Robotecコンテストが終わりました。
結果は....タイムアタックで3位です。
一応、プログラムも間に合いました。寝る暇は無かったですが。(^^;
全10チームで争ったのですが、予選ではトラブル続出で半分がリタイヤ
してしまうという、卒業生としてはちょっと悲しい状況でした。(^^;
かく言う私のチームも、統合デバッグ(前日!)でノイズ問題が色々出てしまい、
超音波センサの感度を落としたり、フェライトコアをかましたり、フォトセンサ
の変調をやめたりと、改造につぐ改造を行いました。
その甲斐あって、コンテストでは抜群の安定度を誇り、一応OBのメンツを保っ
たというところでしょうか。
お約束どおり、「デザイン賞」をいただいてきました。(^^;
惜しい一撃です。あと5cm! 絶好のチャンス!
ロボット写真 製作者(松本氏、私、中村氏)