 愒奜慄儕儌僐儞庴怣婡
愒奜慄儕儌僐儞庴怣婡
愒奜慄儕儌僐儞庴怣婡愒奜慄傪巊偭偨儕儌僐儞梡偺庴怣婡偱慜崁偺憲怣婡偲
慻傒崌傢偣偰巊偄傑偡丅
壜曄懍偺儌乕僞傪俀屄傑偱惂屼偱偒傑偡丅
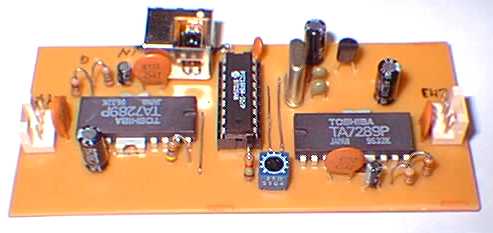 婎斅偺慡懱偱偡丅
婎斅偺慡懱偱偡丅
俀屄偺堦悺戝偒栚偺俬俠偑儌乕僞惂屼梡偺愱梡俬俠偱偡丅
僼傿儞偑恀傫拞偵弌偰偄傞偺偱堦悺幚憰偟擄偄偱偡偑
婡擻揑偵偼巊偄傗偡偄俬俠偱偡丅
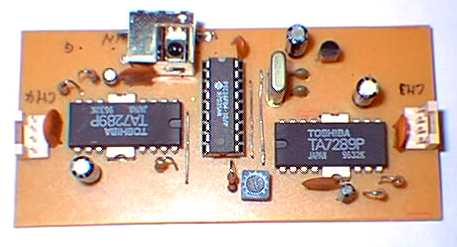 婎斅傪忋晹偐傜尒偨幨恀偱偡丅拞墰忋晹偺嬥懏怓
婎斅傪忋晹偐傜尒偨幨恀偱偡丅拞墰忋晹偺嬥懏怓
偺傕偺偑愒奜庴岝儌僕儏乕儖偱偡丅
椉僒僀僪偵偁傞僐僱僋僞偑儌乕僞傊偺愙懕偲
揹尮嫙媼傪寭偹偨僐僱僋僞偱偡丅
丂丂![]() 栚師儁乕僕偵栠傞
栚師儁乕僕偵栠傞