ラジコン受信機制御部3
PIC16F84を応用したラジコン受信機で、PICにモータ速度制御
専用ICを2個追加して2モータの可変速制御をしています。
1.概要
PIC16F84を応用したラジコン受信機制御部で、モータ速度制御専用IC
であるTA7289Pを2個接続して、2チャンネルの可変速モータ制御を
しています。
受信機高周波部には、「PICラジコン受信機2」のものと同じ物を使います。
2.機能
受信機高周波部から出力された20msec周期のパルス列信号を入力
にして、そのパルス幅に比例してモータの速度を制御するとともに正/逆
回転も制御する。
チャンネル数 : 2チャンネル
入力 : 最小1Vの負論理パルス列
速度分解能 : 正転/逆転 各々16ステップ
モータ制御最大電流: 0.7A 但し連続では約0.3A(6V)程度(2W)
電源 : 5.2〜9VDC NiCdx6個
入力信号形式
・全体が約20msの固定周期で繰り返される。
・各周期の中で各チャンネルの先頭を示すパルスが並ぶ。
(このパルスの信号幅は約0.5msで固定)
・各チャンネルのパルス信号の間隔が各チャンネル
の制御信号に相当し制御内容により可変となる。可変幅は1.0msec。
従ってパルス間隔は 0.5〜1.5msec となります。
3.モータ速度制御用IC「TA7289P」の仕様
このICは本来はステッピングモータの制御用なのですが、モータコイルに
流れる電流制御の機能があり、今回はそれを普通の直流モータの電流制御
に流用しています。
電流制御には、パルス幅制御方式を使っており、かつD/A変換回路による
フィードバック回路が内蔵されているため、PICからは、4ビットの電流値を
指定するデータを送れば良いだけに出来ます。
従って、PIC側ではダイナミックに直接モータを制御することは不要とすること
が出来ます。
回路構成は下図のようになっており、INAとINBで正転、逆転、停止を指定、
D/A変換器にデータを指定すると、その値に従った電流がH-Bridgeに流れる
ようComparatorでGATEをフィードバック制御します。GATEでは内部発振回路
を持ち、Comparaotorの信号に基づいて出力のパルス幅を制御して、H-Bridge
に流れる平均電流を制御するように動作します。内部フィードバック回路により
定電流制御をしますので、PIC側は設定値を出力するだけです。
4.構成
コントローラの回路の構成は下図のようになっており、PIC16F84と2個の
モータ速度制御専用ICだけで出来ています。
5.回路図
全体の回路は下図となります。特別な回路は無いですが、可変抵抗器は、
モータへ流す最大電流を調整するためのものです。
モータからのノイズ混入を防ぐことが大切で、そのための対策が各種必要
となります。特にモータに直接コンデンサを直付けするのが最も効果的です。
下図は拡大表示出来ます。
また、下記に原回路図とパターン図を紹介します。
原回路図は、CADの「HiWIREⅡ」 で描いて
いるのでダウンロードしてご覧下さい。
★受信機制御部3回路図(ダウンロードしてご覧下さい)
★受信機制御部3パターン図(ダウンロードしてご覧下さい)
6.プログラム概要
プログラムの流れとしては1本の流れだけで出来ています。この流れの
実行速度が、即分解能となりますので、出来る限り高速で実行することが
要求されます。
今回の実行速度は概ね 25uSECが1周期となっています。
(本プログラムは結局実用にしなかったためダウンロードファイルは
ありません)
(1)まず全体の流れの概略は下記のようになっています。
START
↓
PORTAの入力ありか? 入力を30uSEC周期で刻みながら
無い時は全モータOFF カウントをして行く。
↓
パルス幅をカウント
↓
1チャンネル分カウント終了したら
今回の幅としてメモリに格納
↓
各チャンネルの幅に合わせて モータの正転/逆転も制御する
モータ速度を出力する
↓
次のチャネルにセット
↓
STARTへ戻る
(2) 次にタイムチャートは下図のようになっています。
別項目で製作した「PICラジコン送信機3」を4チャンネル指定で使います。
←------------ 約20msec周期 ------------→
←0.5〜1.5msec→
______ ______ ______
入力______| CH1 |_________| CH2 |_________________________| CH1 |_____
sampling↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑
約25usecがサンプリングの1周期なので 0.5msec〜1.5msecの信号パルス
幅を刻むと約20〜70カウントとなり、これが分解能となります。
(3)モータの制御方法(方向転換と正転/逆転の制御)
モータへの速度指定の値は下記のようにして求めています。
1.5msec --------
↑ この間は正転の値
↓
--------
1.0msec -------- モータOFF
--------
↑
↓ この間は逆転の値
0.5msec --------
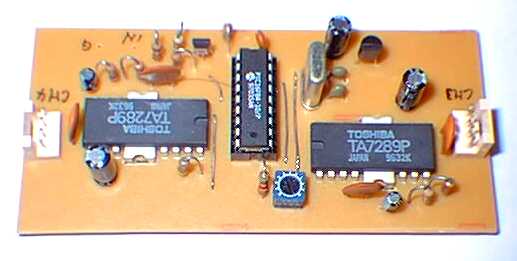
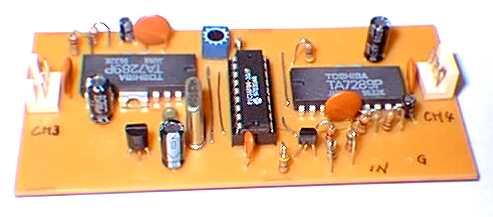
7.実装方法
速度制御用ICの形状がフィン付きで特殊なピン形状なので
実装上は一寸面倒ですが、通常の1mmの穴を
連続して空けて あとでカッターナイフなどで穴の間を切り落として
直線状の穴とします。
 モータからのノイズ混入を避けるため
モータからのノイズ混入を避けるため
モータの接続端子に直接0.1uF程度のコンデンサを
ケースとの間に直付けします。
 目次ページへ
目次ページへ